
At first, I thought building a multirotor was going to be hard. Then I tried tuning. I feel tuning is not so easy to grasp because it’s both objective and subjective at the same time. It’s objective because it’s math! But at the same time, it’s subjective because everyone’s idea of a good tune is […]
How to set up Betaflight using the Betaflight Configurator

In an earlier post, I’ve done a pretty detailed walkthrough of setting up Cleanflight on your flight controller. Back then, even if your board was running Betaflight, you would still set it up through the Cleanflight configurator. Now, however, Betaflight has its own configurator, which is not all too different from the original one, but […]
Why is My Drone Not Flying? Detailed Solutions & Explanations

Drone flying is quickly becoming one of the most fun and interesting things to do, especially now when the prices are extremely affordable, and the tech is easy to use. The market is filled with small to medium-sized models that come in RTF mode (ready to fly) so even the less experienced of us can […]
Betaflight configurator (where to get it and where’s the old one)

Betaflight configurator is an awesomely convenient piece of software. It was available to download through the Chrome app store, and since it ran on Chrome, there was just one version to worry about: the Chrome version. Any computer that could run Google Chrome was able to run the Betaflight configurator, and all was well in […]
Butterflight: A new fork of Betaflight (is it worth trying?)

Butterflight is a fork of the very popular Betaflight firmware. I believe the main reason that Butterflight forked from Betaflight to start with was that the Betaflight devs decided to remove the Kalman filters from the latest release of Betaflight. Some pilots/coders got together and created a new fork of Betaflight called Butterflight, which has […]
How To Setup iNavflight on a Multirotor

What is iNavflight iNavflight is a fork of Cleanflight which is designed to make the best of GPS and navigation capabilities. Cleanflight and Betaflight don’t have the best GPS capabilities – so some developers decided to fork Cleanflight, keep the same interface, and adapt the code to have navigation. Since it’s a fork of Cleanflight, […]
Betaflight anti gravity: what’s it about and how to tune

Since Betaflight 3.1, subsequent releases of the popular firmware have a feature called “anti_gravity” which can be enabled from the “Configuration” tab. Have the Betaflight devs finally found the holy grail to keep your quad in the air forever for unlimited flight time, COMPLETELY destroying the force of gravity? Not quite. However, anti_gravity is very […]
Betaflight Failed To Open Serial Port Error
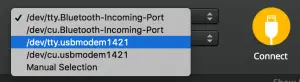
To set up a multirotor before you start flying, you have to hook it up to your computer to tweak settings in the flight controller’s configurator, whether it’s Betaflight, Cleanflight, Raceflight, or Kiss(or anything else for that matter). Sometimes, when you connect a board(such as one with Betaflight), the configurator will show you an error […]
Betaflight PID Tuning (v3.0+ and rates configuration)

PID tuning is was a huge part of getting your copter to fly well. Back in the days of Naze32s, Baseflight, and older versions of Cleanflight, if you didn’t tune your copter, the stock settings resulted in an impossible to fly copter that vibrated like crazy and had a mind of its own. Then along came […]
Betaflight Motor Order: Correct Way and How To Fix Errors
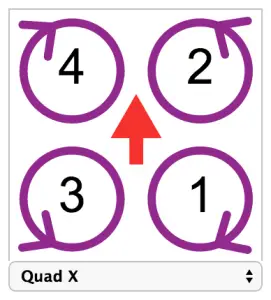
We’ve all been there – spending a good few hours on building a quad, soldering really tight joints, installing the top plate, and when you go to test the motors… …you realize you have the motors in the wrong order. Just for reference, here is how the correct motor order should be: When the quadcopter […]