All quadcopters have 3 essential parts, which are the bare minimum for them to work:
- Motors
- A flight controller
- ESCs(Electronic Speed Controllers)
These three parts are tied together – the flight controller sends signals to the ESCs, and the ESCs tell the motors how fast to spin.
You would need one ESC for each motor, since every motor on a multicopter(tri/quad/hex/what have you) spins at slightly different speeds.
Why do you need ESCs?
Since quadcopters have four motors, they are inherently unstable. Each motor is providing thrust, and things can get very messy. By comparison, helicopters only have one set of blades that provide the thrust, so they’re much more stable(the tail rotor just counters the torque from the main rotor).
The flight controller has a sensitive gyro in it which detects the craft’s position, and it makes minute connections every split second to keep the motors spinning at the correct speed to keep the craft stable.
The ESCs are the middlemen between the flight controller and the motors – the flight controller signals the ESCs, which in turn signal the motors to control their speed.
Without ESCs, the flight controller has no way to directly communicate with the motors.
The ESCs send current through the three wires attached to the motor, and the amount of current they send regulates the speed of the motor.
How to choose an ESC
When you are looking for an ESC, there are three things you want to consider:
- Amperage: ESCs have an amp rating – this is how many amps the ESC can handle safely. Anything higher and the ESC will burn out – the electronics on the ESC won’t be able to handle so much current.The tricky thing with amps is that they vary according to the motor and propeller. When an ESC signals a motor to spin at a given speed, the motor will try its level best to spin at that speed, and it’ll try to pull as much current as it needs to spin at it’s required speed.The general rule is: larger motors = more amps, higher kV = more amps, and heavier props(bigger/higher pitch) = more amps. A combination of all three factors means A LOT OF AMPS!You’ll see that ESCs are rated at 20A or 30A(the most common for 5 inch propeller quadcopters), and now even 35A ESCs are available that can handle the higher current from high voltage batteries(5 cell and 6 cell packs).For smaller propeller sizes and lower cell counts(3 or 2 cells) you can use even lower amp ESCs, like 10A or 6A for really tiny propellers.Generally, the ESC can handle a little more current than what it’s rated for, but just for a few seconds. Manufacturers will usually provide this information as the “burst rating”. A 20A ESC can handle 25A of current for about 10 seconds.Ultimately, you don’t need to worry too much about amps, because for most of your flying(at low-mid throttle), you won’t be drawing that many amps – the majority of the amps are drawn at the highest throttles, which you’ll be at for very little time anyway.
To be safe, stick to 30A ESCs for 4S builds using any kind of motors/5 inch props, and for anything bigger, stick to 35A ESCs. The difference in weight between a 30A ESC and a 35A ESC is negligible and worth having at the risk of your ESC exploding mid air!
- Firmware: The next factor to consider is the firmware your ESC uses.Back in the old(relatively) days of quadcopters, the go-to firmware was SimonK. Since then, ESC firmware has gotten better and better and now you have BLHeli_S and BLHeli_32 firmware.If you are building a quadcopter today, DON’T use SimonK – it’s old and outdated. Get BLHeli_S or BLHeli_32. These firmwares are faster and much smoother.You can also use KISS ESCs, which have their own firmware – it’s really a matter of personal choice now to be honest whether you use KISS ESCs or BLHeli_S/32 ESCs – flight controllers have gotten that good now.I am not going to get into the technical details of BLHeli and KISS firmware, but in case you are interested, check out the write-up on the GitHub repo.TL;DR: Get BLHeli_S or BLHeli_32(better, faster) ESCs.
- Size and weight: The final thing to consider is the size and weight of the ESC. Generally the size and weight are directly proportional to the amp rating – 30A ESCs will be heavier than 20A, and so on.Size is a more important consideration, since your frame has to be big enough to fit the ESC!KISS ESCs are quite large, so they may stick out of the side of the arms on many frames. You will have to compare the dimensions of the ESC to the width of your frame’s arms whenever you shop around. One or two mm bigger will not be an issue, but anything larger and it will start getting clunky(and harder to keep in place).If your frame has really thin arms, or really short arms in the case of a micro frame, then you will need 4-in-1 ESCs – these are essentially 4 ESCs on a single board, with solder pads for the four motors and a set of wires coming out which are the signal wires.ESCs come in all shapes and sizes, so if you’re looking for 4-in-1 ESCs there’s something in every amperage from 6A all the way up to 35A.
Wiring up an ESC
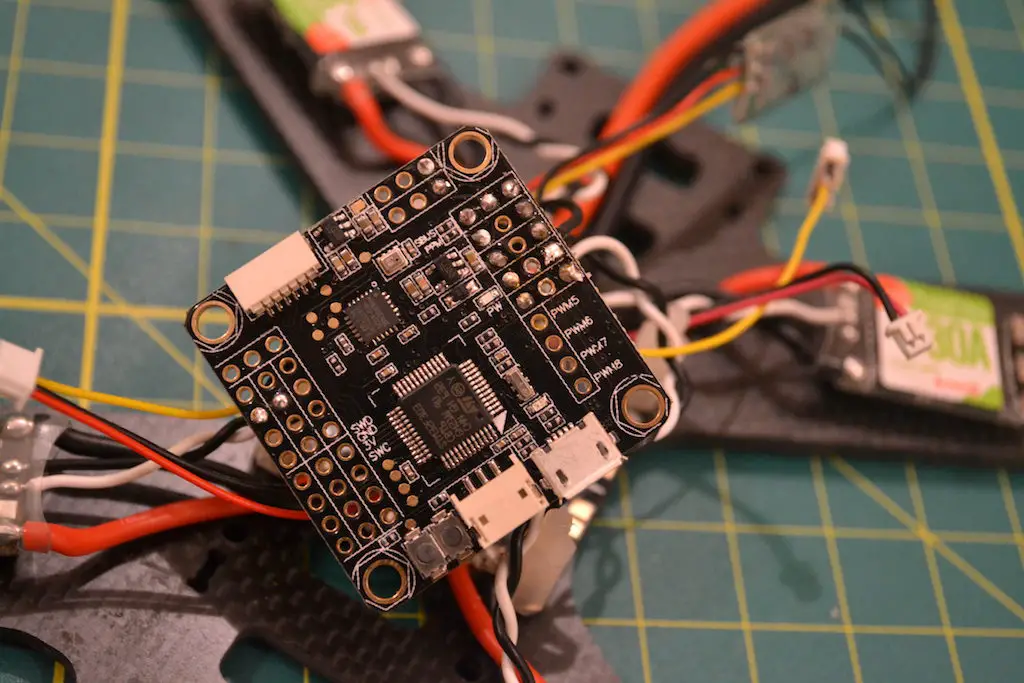
Wiring an ESC is fairly simple – all ESCs will have 7 solder pads(or 7 wires sticking out of them, or a mix).
At one side of the ESC, there are 2 wires/pads for the negative and positive power wires. These wires get connected to the PDB where the main battery power is coming in.
On that same side, there will be two smaller wires/pads, usually colored white and black but that may vary. One wire(usually black, but in case it isn’t black, it’ll be marked) is the ground wire, and the other wire(usually white or yellow, but it will be marked) is the signal wire, which carries the message from the FC to the ESC.
Both the ground and signal wires go on to your flight controller at the designated spot – since a quadcopter has four motors, the corresponding ESC(whichever motor it’s connected to) will go to that input on the flight controller. These inputs are marked on the flight controller, too.
Many, if not most flight controllers have 3 holes/pads for the ESC inputs – one will be the signal pad, one will be for voltage(usually not needed, since a) your ESC will not have it and b) your FC is getting power from elsewhere, check out this guide for more information on building), and one will be for ground.
There’s a bit of a debate as to whether the ground wire is absolutely necessary or not, and while the quadcopter will still fly even if you only connect the signal wire, the ground wire helps keep the signals clean and free from voltage spikes and interference.
On the other side of the ESC, you have three wires/pads. These connect to your motor.
In the old days, you’d have to wire up the ESCs to your motors, then test each motor, and if a motor was spinning in the wrong direction, you would cross over one set of the wires:
So if you first wired it as A B C and that spun the motors in the wrong direction, you’d cross it over to B A C or A C B or even B C A to get it to change direction.
With BLHeli, BLHeli_S, and BLHeli_32 firmware, you can change the motor direction in the ESC software itself, so you don’t have to keep changing the wires.
Some ESCs also have telemetry wires, which send data like current and RPM to the flight controller. These are not necessary to use, but only if you’d like to see that data.
Top 5 ESCs for FPV quadcopters
Since ESCs will vary depending on propeller size, this list will be for 5″ propeller quadcopters. I hope to add more for smaller builds soon.
-
Wraith32 – BLHeli_32
-
RacerStar 30A BLHeli_S(best for budget builds)
-
Sunrise Cicada 30A BLHeli_S
-
KISS 24A
-
RacerStar 30A 4-in-1 BLHeli_S
Leave a Reply
You must be logged in to post a comment.